在本教程文章中,您将了解步进电机的工作原理。我们将涵盖步进电机的基本工作原理,它们的驱动模式和步进电机的类型。你可以看下面的阅读文章。
工作原理
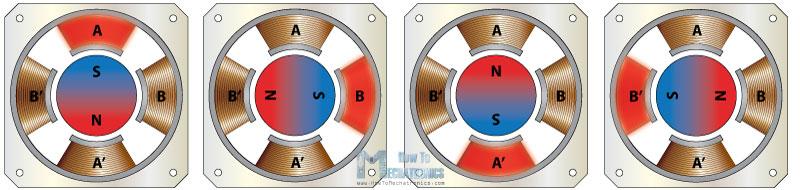
步进电动机是一种无刷直流电动机,它以步进方式旋转。这是一个非常有用的无反馈反馈控制器,因为这是一个非常有用的反馈。步进电机由一个转子组成,转子通常是一个永磁体,它被定子绕组包围。当我们以特定的顺序一步一步地启动绕组,让电流流过绕组,它们将使定子磁化,并分别产生电磁极,从而推动电机。这就是步进电机的基本工作原理。
驱动模式
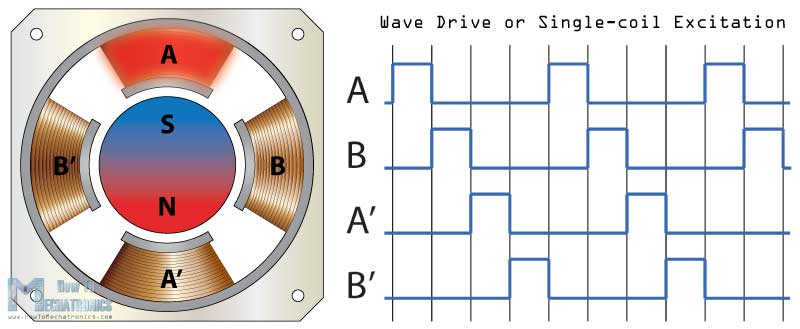
步进电机有几种不同的驱动方式。第一种是波驱动或单线圈励磁。在这种模式下,我们一次只激活一个线圈,这意味着对于这个有4个线圈的电机,转子将在4个步骤中完成整个循环。
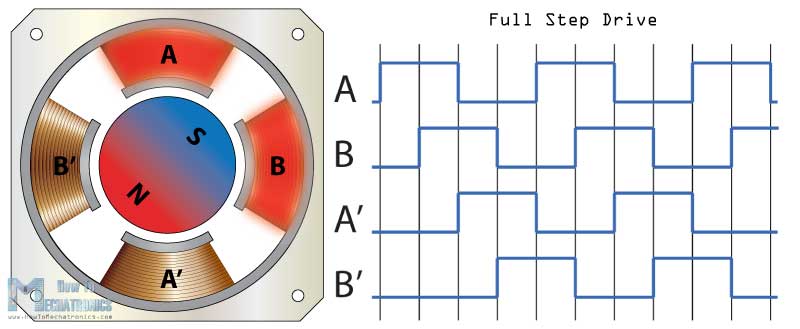
下一个是全步驱动模式,它提供了更高的扭矩输出,因为我们总是有2个活跃的线圈在一个给定的时间。然而,这并不能提高步进电机的分辨率,而且转子将在4步中完成一个完整的循环。
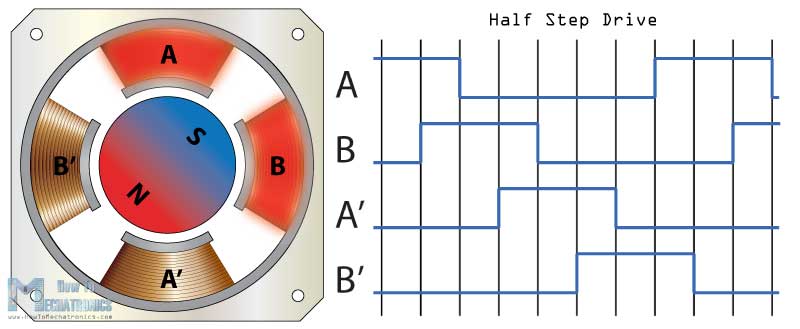
为了提高步进机的分辨率,我们使用半步进驱动模式。此模式实际上是前两种模式的组合。
先是一个线圈,然后是一个线圈,然后是2个线圈,然后是激活线圈。所以在这种模式下,同样的结构我们可以得到两倍的分辨率。现在转子将以8个步骤进行全循环。
但是最常见的方法是现在是微步。在这种模式下,我们以正弦波的形式向线圈提供可变的控制电流。这将使转子运动平稳,降低零件应力,提高步进电机的精度。

提高步进电机分辨率的另一种方法是增加转子极数和定子极数。
按结构划分的步进电机类型
按结构分为三种不同类型的步进电动机:永磁式步进电动机、变磁阻式步进电动机和混合式同步步进电动机。
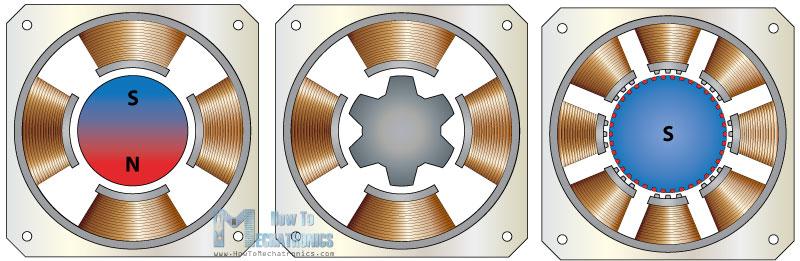
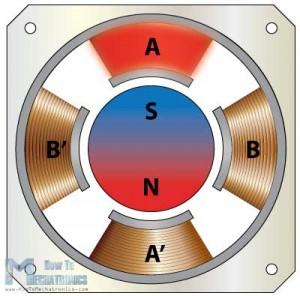
这个永磁体步进电机有一个由定子绕组驱动的永磁转子。与推动转子的磁极相比,它们产生相反的极性。
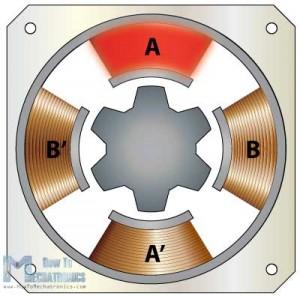
下一种类型可变不情愿步进电机采用非磁化软铁转子。转子的轮齿与定子偏移,当我们以特定的顺序激活绕组时,转子会分别移动,以使定子和转子轮齿之间的间隙最小。
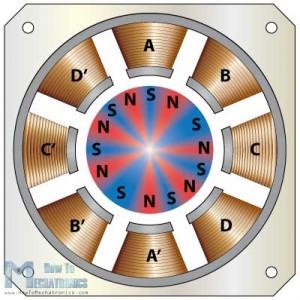
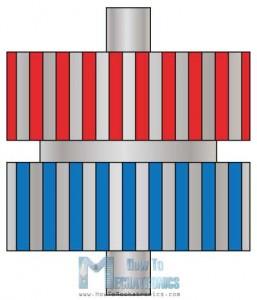
这个混合同步电机是前两个步进电机的组合。它有永磁齿形转子和齿形定子。转子有两个极性相反的部分,它们的齿偏移如图所示。
这是一个常用的混合式步进电机的正面图,定子上有8个磁极,由2个绕组a和B激活。因此,如果我们激活绕组a,我们将磁化4个磁极,其中2个为南极,2个为北极。
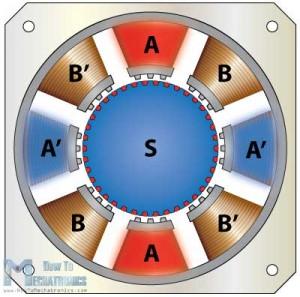
我们可以看到,这样转子的齿与a极的齿对齐,而与B极的齿不对齐。这意味着在下一步,当我们关闭a极并激活B极时,转子将逆时针移动,其齿将与B极的齿对齐。
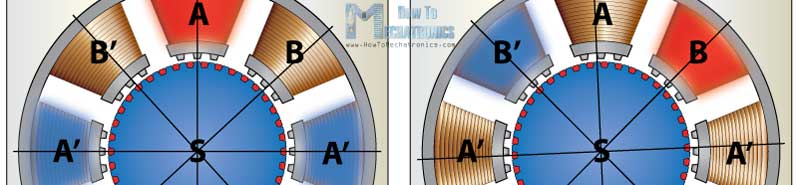
如果我们继续以特定的顺序激活磁极,转子将连续运动。在这里我们也可以使用不同的驱动方式,如波驱动、全步驱动、半步驱动和微步进驱动,以进一步提高步进电机的分辨率。
*博客内容为网友个人发布,仅代表博主个人观点,如有侵权请联系工作人员删除。

